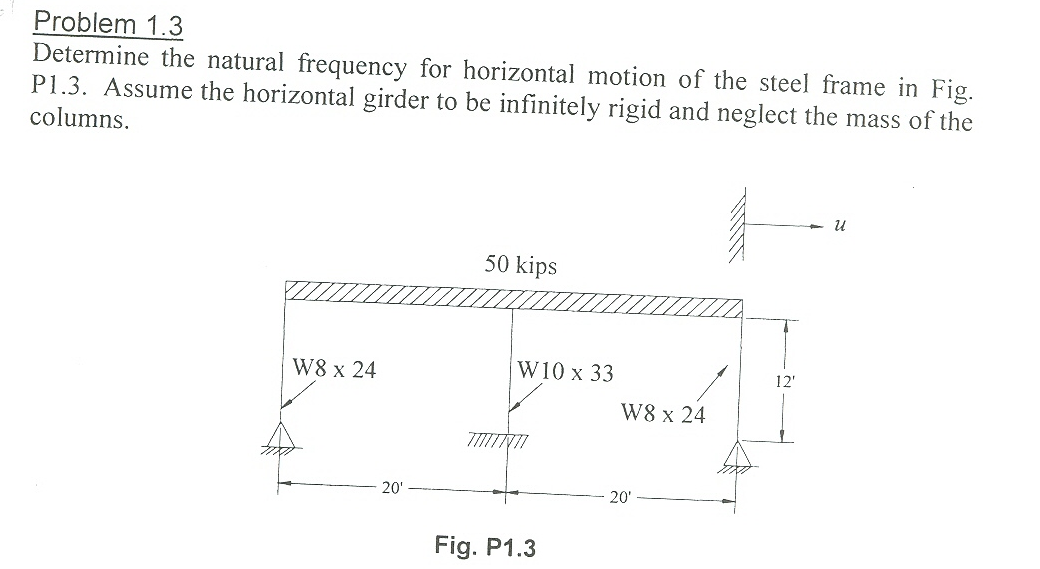
Solution
From steel manual, we obtain the following values for  for the different
for the different  sections:
sections:
 , and
, and  .
.
Weight of girder or
or  lbs.
lbs.
Gravity Acceleration 


We start by finding the effective stiffness 
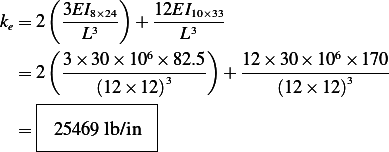
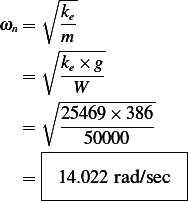
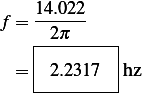
But  hence
hence
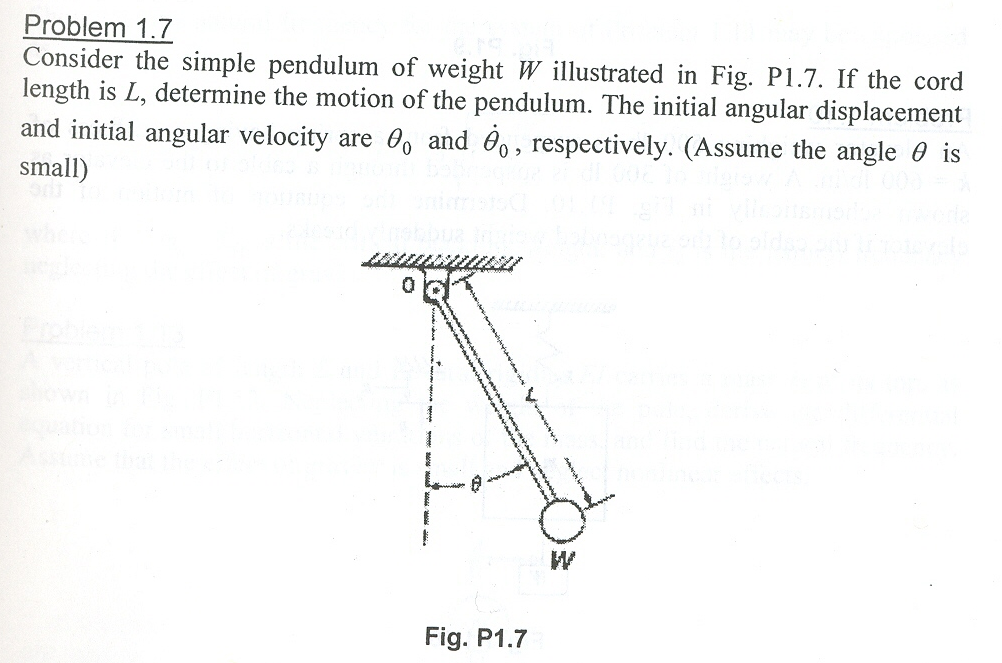
Solution
The equation of motion is derived in 2 methods. One based on the force method and the second is based on energy method. In both method we assume there is no damping in the system and no friction nor air resistance.
First method
First draw a free body diagram showing forces acting on pendulum mass, which are the weight  and the
tension
and the
tension  in the cord.
in the cord.
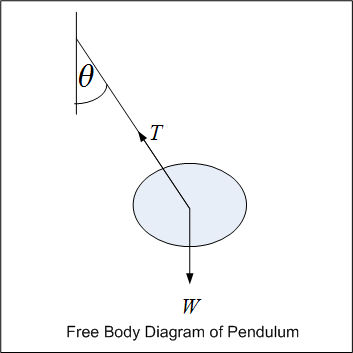
Next resolve the forces parallel and perpendicular to the direction of motion as follows
Where  is the tangential acceleration and
is the tangential acceleration and  is the mass of the pendulum bob. Since
is the mass of the pendulum bob. Since  where
where  is an arc length, and
is an arc length, and  when
when  is in radians, hence
is in radians, hence 
So applying Newton second law of motion along the tangential direction we obtain
Where the minus sign is due to the fact that force acts in the direction opposite to increasing
 .
.
But  hence
hence
This is the second order differential equation of motion we need to solve. This ODE is non-linear in  .
Assuming
.
Assuming  is small, and since
is small, and since  , hence we see that for small
, hence we see that for small  ,
,  , we the
ODE becomes
, we the
ODE becomes

This is free vibration undamped motion. Assume the solution is  , we obtain the characteristic
equation
, we obtain the characteristic
equation

which has solution  , Hence the solution is
, Hence the solution is
This has the solution

Now we find  from initial conditions. at
from initial conditions. at 
 , and at
, and at 


Hence the natural frequency
Hence the general solution is
Let  , and
, and  the solution can also be written as
the solution can also be written as

We see that the natural frequency  of the bob is
of the bob is

And it does not depend on the mass of the bob.
Second method
Here is another derivation. Since there is no damping in the system then the energy of the system
 is constant.
is constant.
But  , where
, where  is the height above the reference level. Taking the reference level when the bob
is at the lowest point, we see that at any instance of time
is the height above the reference level. Taking the reference level when the bob
is at the lowest point, we see that at any instance of time 
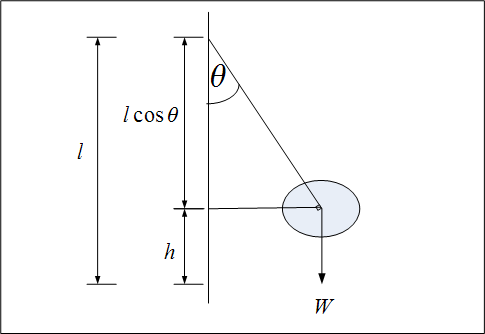
And the  any that moment is given by
any that moment is given by  , but
, but  , hence
, hence  , Hence we obtain the
energy as
, Hence we obtain the
energy as

Since  is constant, then
is constant, then  , hence
, hence
We have 2 solution. Ignoring the solution that  since this is trivial. We obtain the same ODE as
above which is
since this is trivial. We obtain the same ODE as
above which is
The advantage of the derivation based on energy is that one is working with scalar quantities, hence one does not need to worry about sign of forces and direction of motion as one would with the force method.
Solution
Since
And since  in this case (10 cycles), hence
in this case (10 cycles), hence
But  and
and  , hence
, hence
Therefore

 rad/sec
rad/sec
Since viscous damping force is proportional to speed, hence  , then
, then
a)  , but
, but
Hence

Hence
b) Since
But 
Hence
Then
c)The logarithmic decrement  , But
, But  , hence
, hence
Hence
c)Since

Then

Hence








Given a point  coordinates in cylindrical
coordinates in cylindrical  , and if we wish to obtain its coordinates in
cartesian
, and if we wish to obtain its coordinates in
cartesian  , then use the following transformation rules
, then use the following transformation rules

Example using Mathematica:

Given a point  coordinates in cartesian
coordinates in cartesian  , and if we wish to obtain its coordinates
cylindrical
, and if we wish to obtain its coordinates
cylindrical  , then use the following transformation rules
, then use the following transformation rules
Example using Mathematica:
