HW 3.23
Nasser Abbasi
OUTPUT
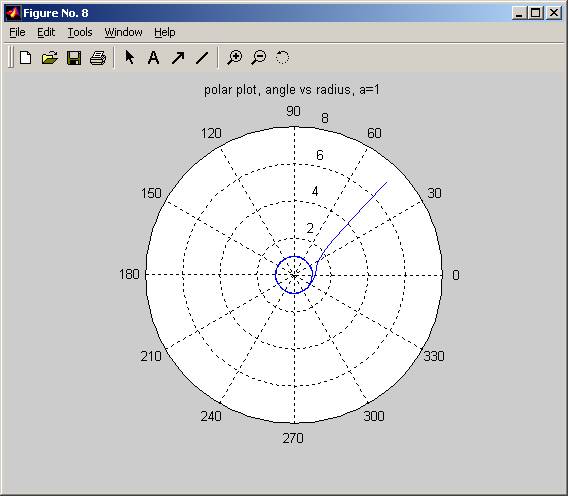
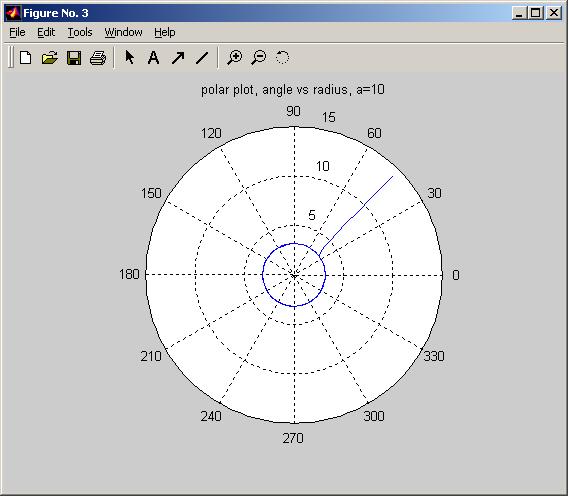
The first two runs for a>0, they show that particle spirles to around a circle of radius sqrt(a).
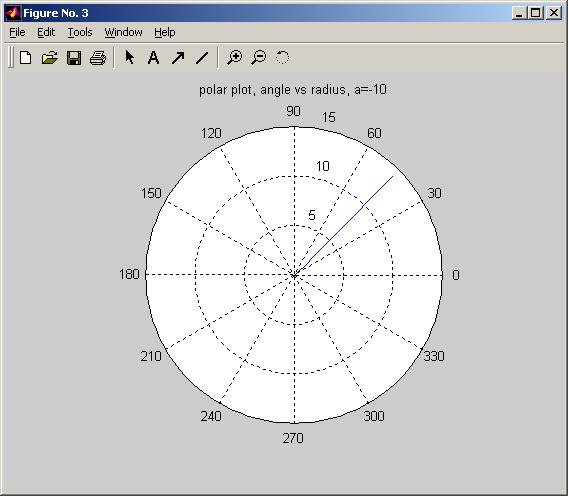
The third plot for a<0, it shows the particle spirles to the origin.
» nma_HW_3_23
nma_HW_3_23 - Program to solve HW 3.23
Enter x initial value (m): 5
Enter y initial value (m): 5
Enter number of steps: 100
Enter time step (sec): 0.1
parameter a value:1
Final radius is 0.999951
a=1, sqrt(a)=1
»
» nma_HW_3_23
nma_HW_3_23 - Program to solve HW 3.23
Enter x initial value (m): 10
Enter y initial value (m): 10
Enter number of steps: 200
Enter time step (sec): 0.1
parameter a value:10
Final radius is 3.16218
a=10, sqrt(a)=3.16228
» nma_HW_3_23
nma_HW_3_23 - Program to solve HW 3.23
Enter x initial value (m): 10
Enter y initial value (m): 10
Enter number of steps: 200
Enter time step (sec): 0.1
parameter a value:-10
Final radius is 1.20127e-018
a=-10, sqrt(a)=0
»
SOURCE CODE
%
nma_HW_3_23 - Program to solve HW 3.23
clear all; help nma_HW_3_23; % Clear memory and print header
%
% Nasser
Abbasi, HW 3.23
%
%* Set
initial position of the particle.
x0 = input('Enter x initial value (m): ');
y0 = input('Enter y initial value (m): ');
x_now = x0;
y_now = y0;
state = [ x_now y_now
]; %
Used by R-K routines
%
%
Parameter to pass to the R-K integrator via rk4.
%
param = struct( 'a',0 );
% set rk
adaptive error, and initialize time
adaptErr = 1.e-3; %
Error parameter used by adaptive Runge-Kutta
time = 0;
%* Loop
over desired number of steps using specified
% numerical method.
nStep = input('Enter number of steps: ');
tau = input('Enter
time step (sec): ');
a = input('parameter
a value:');
param.a=a;
for iStep=1:nStep
%* Record position and energy for
plotting.
xplot(iStep) = x_now; % Record position for
polar plot
yplot(iStep) = y_now;
tplot(iStep) = time;
[state time tau] = rka(state,time,tau,adaptErr,'nma_HW_3_23_deriv',param);
x_now =
[state(1)]; % 4th order Runge-Kutta
y_now =
[state(2)];
end
for(i=1:length(tplot))
radius(i) = sqrt(xplot(i)^2+yplot(i)^2);
angle(i) =
atan2(yplot(i),xplot(i));
end
fprintf('Final radius is %g\n',radius(end));
fprintf('a=%g, sqrt(a)=%g\n',a,sqrt(a));
figure;
plot(xplot,yplot);
title(sprintf('X vs Y plot, a=%g',a));
xlabel('X in meter');
ylabel('Y in meter');
figure;
polar(xplot);
title('x in polar plot');
figure;
polar(angle,radius);
title(sprintf('polar plot, angle vs radius, a=%g',a));
function deriv
= nma_HW_3_23_deriv(s,t,param)
% Returns right-hand side of HW 2.3; used by
Runge-Kutta routines
% problem 3.23
%
% Inputs
% s
State vector [x y]
% t
not used
% param
Parameter struct
% Output
% deriv
Derivatives
% Nasser
Abbasi, feb 25. 2002.
x= s(1);
y= s(2);
a= param.a;
deriv(1) =
a*x+y-x*(x^2+y^2);
deriv(2) =
-x+a*y-y*(x^2+y^2);
return;